





无人驾驶汽车渐行渐近,4D毫米波雷达有何独到之处?

苏州豪米波:4D毫米波雷达与摄像头融合
苏州豪米波成立于2016年,由“国家高层次人才”白杰教授、海外归国射频专家为核心组建,旨在打破国外垄断,填补国内空白,积极打造具有高度自主知识产权的智能感知技术和人工智能系统。
名如其实,该公司专攻毫米波技术,掌握全套ADAS集成控制算法及汽车毫米波雷达核心技术,可根据主机厂车型要求定制设计和合作开发。其产品2018年底已在江铃、江淮等前装量产,包括车载BSD(盲点车辆识别)系统和FCW(前车碰撞预警)系统等。BSD系统最大探测距离100米,角度范围150度;FCW系统最大探测距离200米。
白洁教授认为,多传感器融合是构建稳定感知系统的必要条件,特别是雷达与摄像头的融合。他说:“人们经常遇到一些复杂的天气情况,如大雨、大雾、沙尘、强光、夜晚,这些对图像和激光雷达是非常恶劣的场景,难以用单个传感器应对,一种传感器无法处理所有场景。一些被认为比较成熟的智能驾驶也多次发生撞车事故,都是其传感器系统失效所致,代价惨痛。”
他介绍说,从本地数据处理程度看,传感器主要分为集中式、分布式、混合式结构。目前常用的是混合式结构,由分布式传感器分别进行数据处理,得到目标信息列表后再进行融合,因为毫米波雷达是目标点云,得到的是处理后的效果;激光雷达也是如此。
随着深度学习研究的发展,近年来出现了一些比较前沿的融合跟踪方案:普通雷达点云+摄像头、雷达射频图像+摄像头,以及4D雷达点云+摄像头。目前大多数传感器融合方法都是使用激光雷达和摄像头实现高精度3D目标检测。但这种方法有其局限性,摄像头和激光雷达对不利天气都很敏感,对远处目标检测不够精确,且激光雷达成本高,普及起来有一定困难。由于雷达对恶劣天气有很好的鲁棒性、探测距离非常远、能精确测量目标速度,而且成本低,在自动驾驶中越来越受到重视。
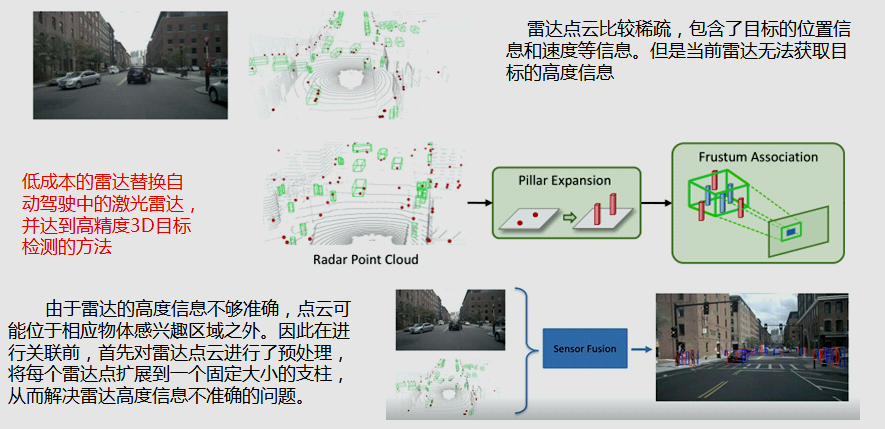
摄像头与雷达融合的网络
基于TI的AWR2243芯片的4D雷达城市道路交通参与者目标分类与检测研究,包括同济大学测试场采集的目标检测与分类数据集可视化结果表明,4D雷达可以输出有高度的目标点云,反映目标的轮廓外形。虽然与激光雷达点云成像原理不同,仅从毫米波雷达的点云还无法准确判断一个目标额外形等特征,但是其点云的散射特征具备一定规律。
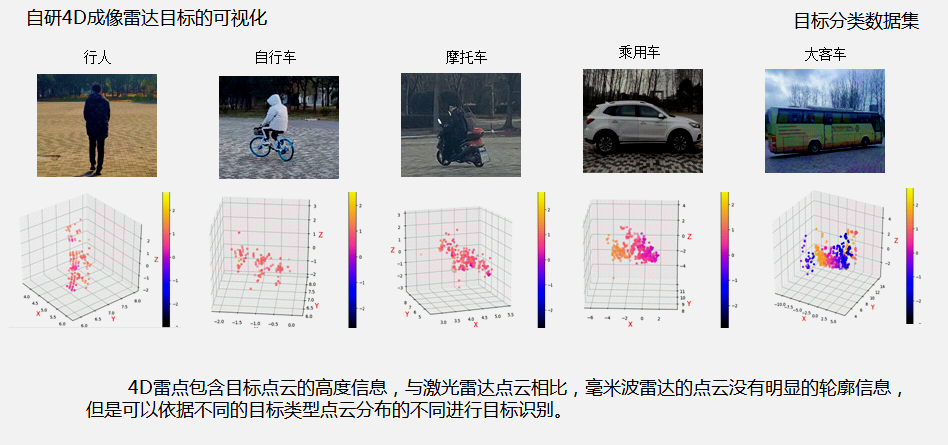
4D成像雷达目标的可视化
利用机器学习目标分类算法吸取点云的几个特征:多普勒速度、点云强度分布,与距离有关的关联特征等,在分类算法数据集中测试中实现了很高分类能力,行人95%以上,大型车辆达到99%。机器学习的特点是参数少,便于进行嵌入式分类。
3D雷达点云虽然比激光雷达的稀疏,但是探测距离更远,且包含了目标的速度信息,而4D毫米波雷达可以辅助实现3D目标检测。可以看到,在相同场景,4D毫米波雷达的点云分布与16线激光雷达有明显区别。前者每个目标点云更丰富,探测距离更远。

4D豪米波雷达与激光雷达点云分布

想象未来
上述公司都认为,丰富的点云将使4D雷达在L4及以上系统中发挥更重要的作用,也就是说,有助于大大提升毫米波雷达感知系统的地位。由于雷达中集成的处理器嵌入了软件,主机厂可以更多地关注图像处理和机器学习,而不用在低水平雷达算法开发上耗费精力。
未来将属于4D毫米波雷达!

 分享
分享
图片新闻








最新活动更多
-
7月22-29日立即报名>> 【线下论坛】第三届安富利汽车生态圈峰会
-
7.30-8.1火热报名中>> 全数会2025(第六届)机器人及智能工厂展
-
7月30-31日报名参会>>> 全数会2025中国激光产业高质量发展峰会
-
即日-2025.8.1立即下载>> 《2024智能制造产业高端化、智能化、绿色化发展蓝皮书》
-
即日-8.30免费下载>>> 福禄克在线温度监测应用案例手册
-
精彩回顾立即查看>> 【在线会议】英飞凌新一代智能照明方案赋能绿色建筑与工业互联
推荐专题

中国智能制造数字化转型大会")





发表评论
登录
手机
验证码
手机/邮箱/用户名
密码
立即登录即可访问所有OFweek服务
还不是会员?免费注册
忘记密码其他方式
请输入评论内容...
请输入评论/评论长度6~500个字
暂无评论
暂无评论